2010: iRobot Rock Award
2011: iRobot Chairman's Award Nomination
2012: iRobot Patents Award
| A considerable portion of my work at Nekton Research and iRobot cannot
be disclosed, but I'll share a few things here that can. At Nekton and
iRobot, I designed, built, tested and demonstrated highly integrated robotic systems
that perform reliably in harsh environments. I also exceled in project
management and leadership by ensuring that all contributors had what
they needed to execute on time, on budget and exceed the customers
expectations. The most important way that I could equip the team for success was by collaboratively establishing a shared vision that everyone was willing to own. This required frequent
customer interface and management, often times helping the customer
identify and prioritize their needs and expectations and find creative
ways to work around their constraints. | |
| Awards received while working for iRobot: 2010: iRobot Rock Award 2011: iRobot Chairman's Award Nomination 2012: iRobot Patents Award |
Countermeasures: I was project manager for all Mobile Acoustic
Countermeasure projects at Nekton and iRobot.
I led a multi-disciplinary engineering team and subcontractors as we designed built and fielded 4 different variants of the
countermeasure. I designed and led the development effort for 2
patented propulsion and vehicle control technologies. I have planned and directed field testing and
technology demonstrations at various Navy facilities and test locations. I have directed integration and field testing of
countermeasures and launch apparatus on manned submersibles in the Pacific and Gulf of Mexico. I managed
a large budget and multiple corporate subcontractors in different locations. I secured 4 rounds of funding for countermeasure programs totaling $9.5M over 4yrs,
and transitioned our Mobile Acoustic Countermeasure designs to Argon ST
/ Boeing for production. Customers: Office of Naval Research, PMS
415, Naval Undersea Warfare Center
Description of Next Generation Countermeasure | |
Reacquire, Identify, Localize Swimmer (RILS): Project Manager for the RILS Port and Harbor Security System. I led a multi-disciplinary engineering team and subcontractors to develop a high speed platform for port and harbor security for acquisition by the US Navy. I secured 3 rounds of funding, totaling $5.2M over 3 yrs. Customers: Office of Naval Research, SPAWAR Systems Center Pacific |
|
 |  |
 |
|
| BioBay: Principal investigator for the Army
SBIR “In situ Aquatic Biomonitoring Platform” project. I
led a multi-disciplinary / multi-partner team
of EE, ME, Software and Aquatic Toxicologists to develop a whole
organism
bio-sensor. Secured 3 rounds of funding totaling $4.3M over 4yrs
from US Army Center for Environmental Health Research, transitioned
technology to product (right) and sold biomonitors to the USEPA. Biobay Report, Public Release | 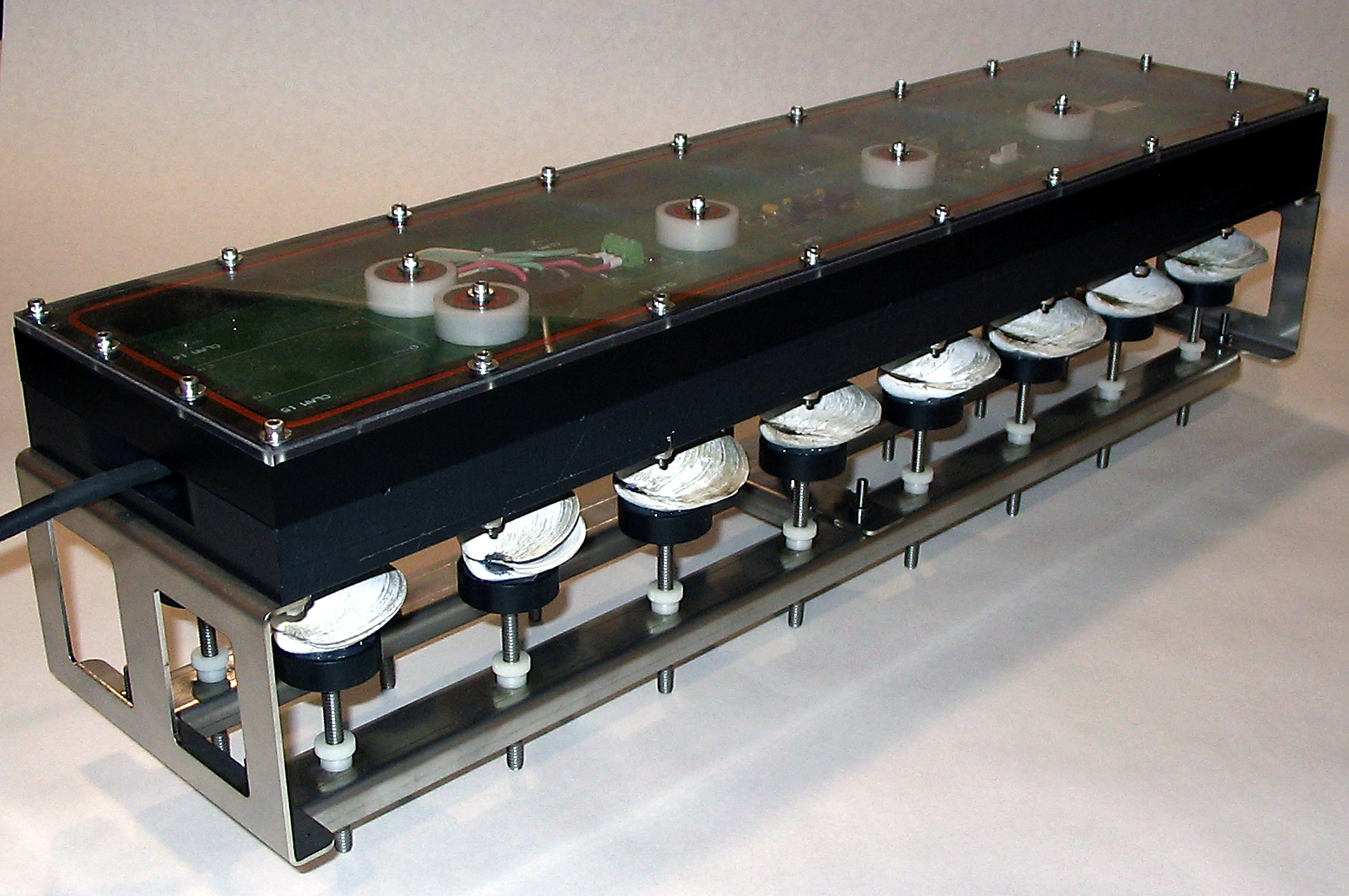 |
Various systems that I've designed and / or managed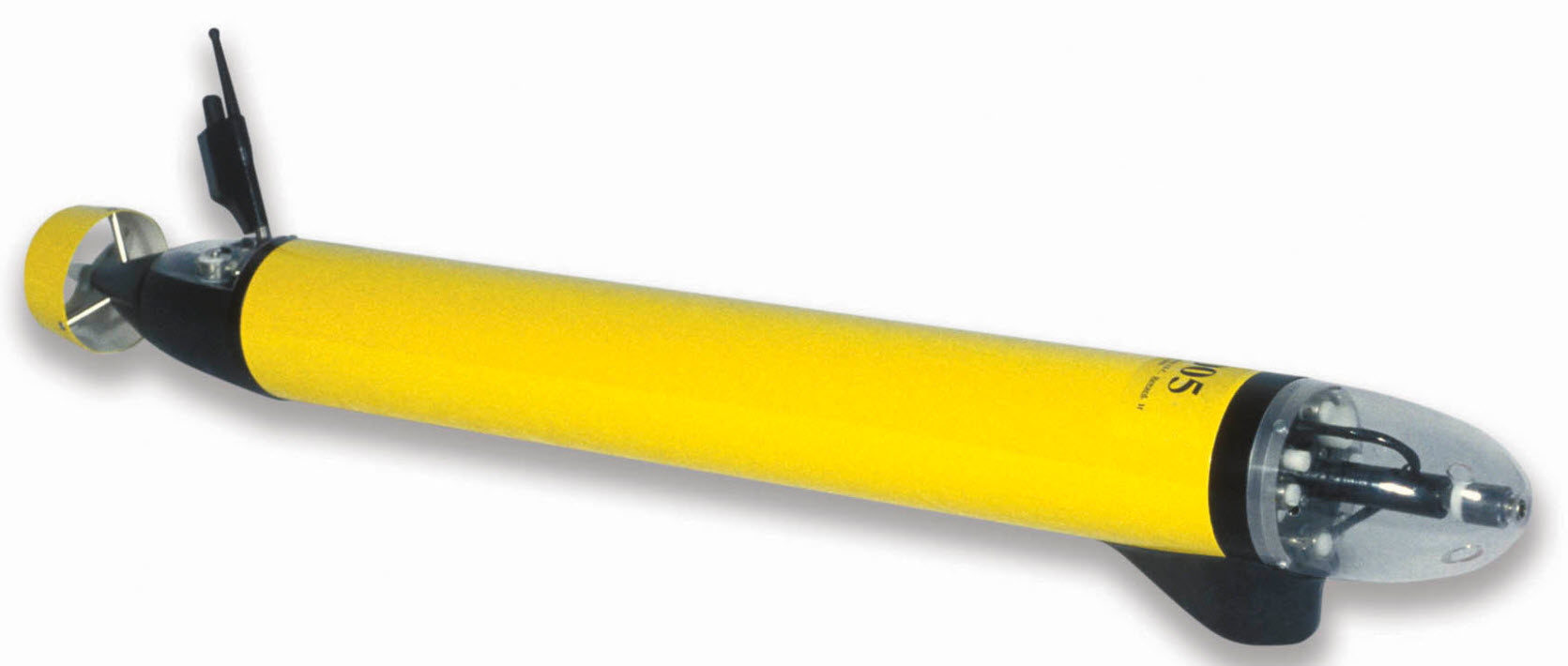 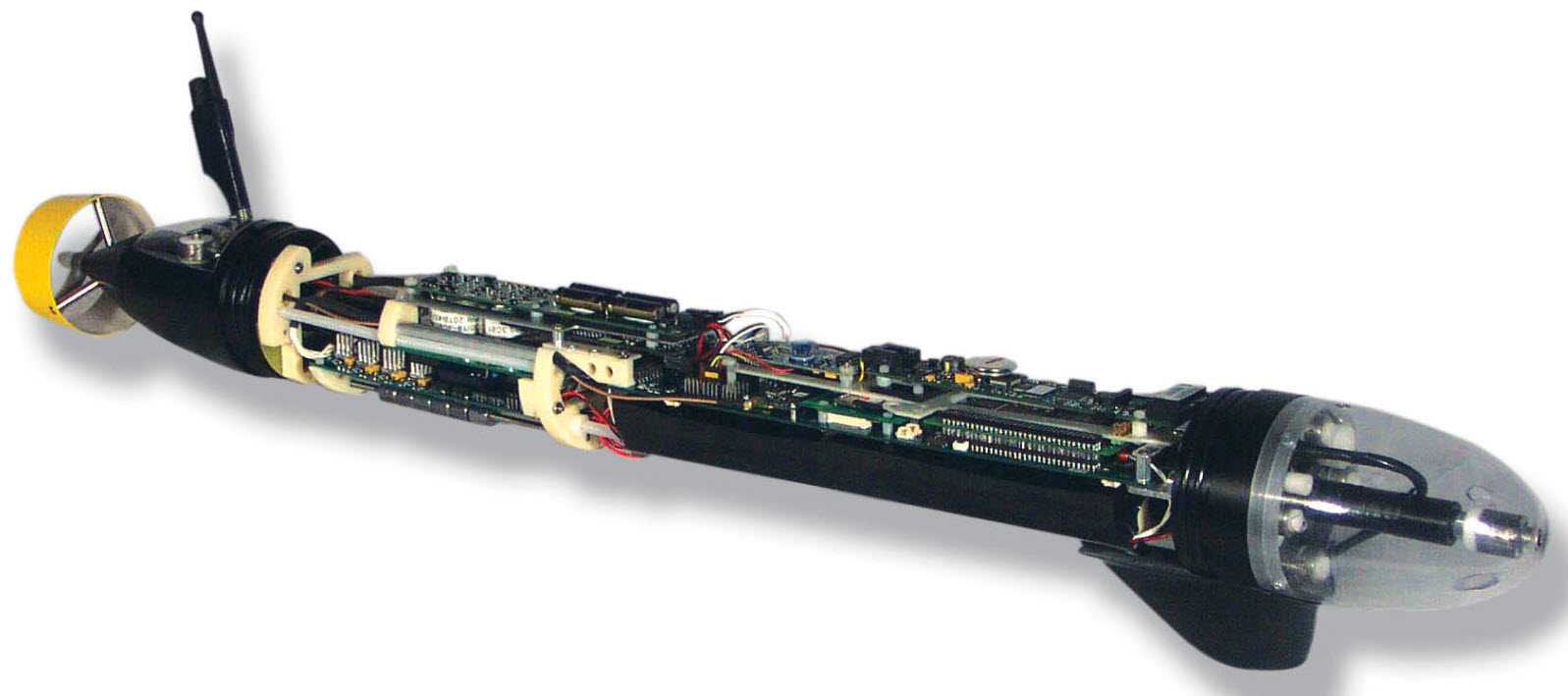  |
  |
 |
|
| Below: Prepping field test apparatus |
Below: Customer Demo, Gulf of Mexico |
 |
 |
 |
 |
 |
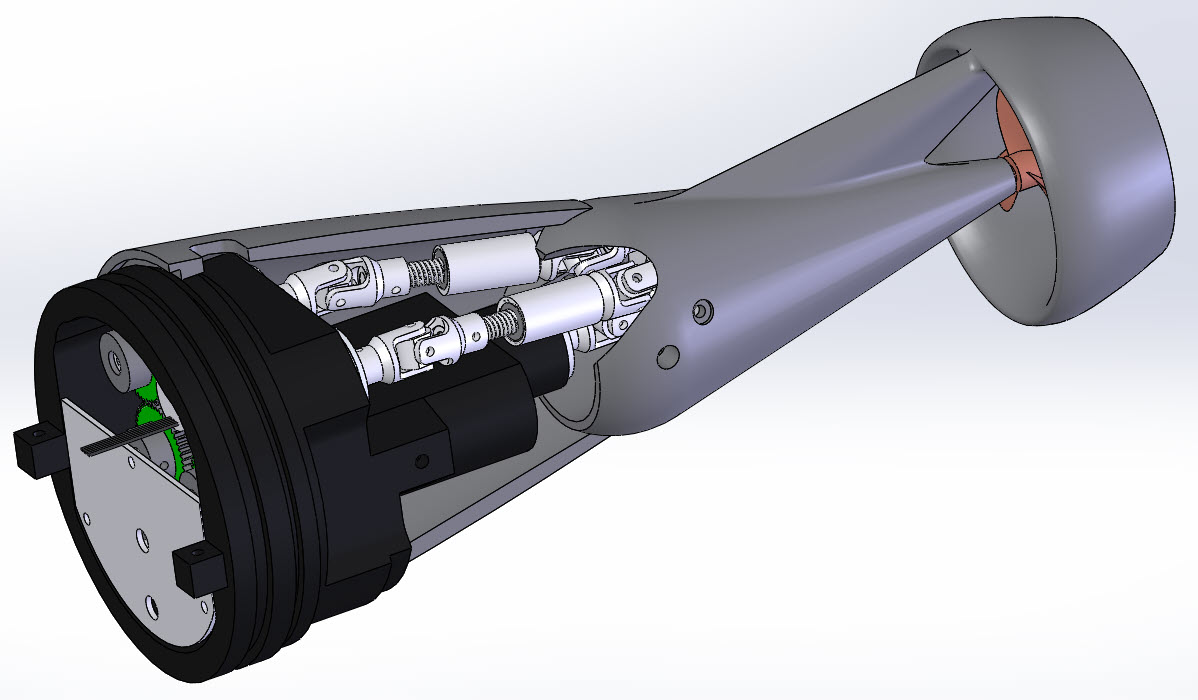 |
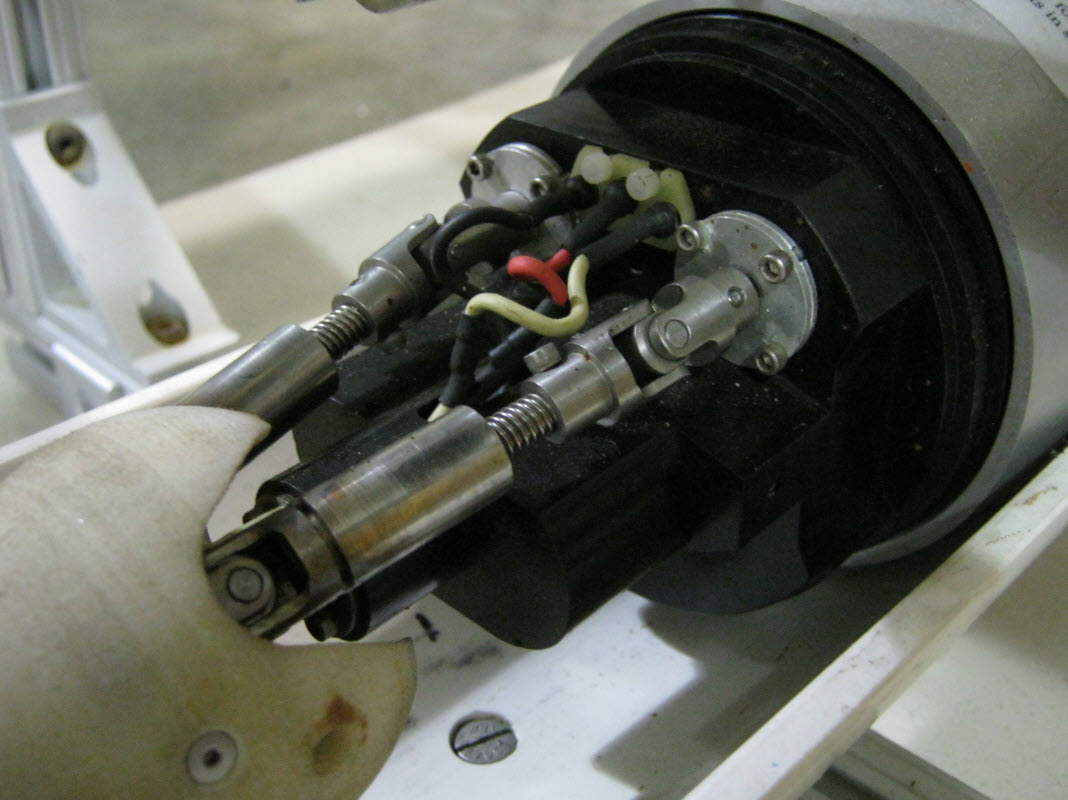
| I
designed the vectored thruster for all of the Ranger and RILS AUV
variants. This design has hundreds of hours of use /
abuse. The articulating nozzle / strut / flow form are selective laser
sinter nylon. |
|
| Other smaller projects that I was involved with at Nekton / iRobot: Gamera: Developed an AUV for Nekton Research as Masters Degree thesis project. Employed NCSU an Duke engineering students for sensor integration, programming and participation in AUVSI student competition. Microhunter: Mechanical engineer on Microhunter Projects, developed trim system that permitted quick trim adjustments in pitch, roll and overall buoyancy. Edgetech Towfish: Mechancial engineer and fabricator for EdgeTech Deep Water, Side Scan Sonar Towfishes. 6 units delivered to Edgetech. Pill Counting: Co-inventor of patented, pill counting and dispensing technology. Led design effort for 4 sub systems on the prototype model Parata Robotic Dispensing System (RDS). These machines are in Walgreens, Wal-Mart, CVS, etc. all over US. | |
|
Advancement at Nekton / iRobot:
I started working for Nekton Research as a graduate student intern in March 2000. I became a full time employee of Nekton Research after I graduated from NCSU in May 2001. In September 2008, iRobot acquired Nekton Research and I became an employee of iRobot. I started at Nekton Research as an associate Mechanical Engineer and Robot Fabricator. I advanced to Project Manager and Customer Interface for several large U.S. Navy programs and Lead Mechanical Engineer for iRobot Maritime. At iRobot I was also Sr. Research Scientist and Principal Investigator for the US Army Biobay project. | |
ryanrun8@gmail.com
Images shown on this page are property of iRobot and have been approved for public release. © 2012 iRobot Corp. | |